prosilica.adl
This is a driver for Gigabit Ethernet and Firewire cameras from Prosilica. The driver is only supported under Windows (EPICS win32-x86 architecture) and Linux because the vendor library is only provided as a pre-built binary for those operating systems. The vendor library provided by Prosilica does callbacks to a user-supplied function each time there is a new frame. Thus, the driver does not need to create a thread itself for callbacks."
The vendor library supports saving individual frames as TIFF files, and this is implemented in the driver. Other file plugins, such as the NDFileNetCDF plugin can be used to capture or stream images much more rapidly in the netCDF file format.
This driver inherits from ADDriver. It implements nearly all of the parameters in asynNDArrayDriver.h and in ADArrayDriver.h. It also implements a number of parameters that are specific to the Prosilica cameras. The prosilica class documentation describes this class in detail.
The driver redefines the choices for several of the parameters defined in ADDriver.h. The ADTriggerMode choices for the Prosilica are:
The Prosilica supports hardware timing input and output signals that are supported in the driver.
The NDFileFormat choices for the Prosilica are:
The NDDataType choices for the Prosilica are:
The NDColorMode choices for the Prosilica are:
The color Prosilica cameras are also capable of various YUV color formats but these are not supported in the driver. They may be added in a future release.
The Prosilica driver implements the following parameters in addition to those in asynNDArrayDriver.h and ADDriver.h:
| Parameter Definitions in prosilica.cpp and EPICS Record Definitions in prosilica.template | ||||||
| Parameter index variable | asyn interface | Access | Description | drvInfo string | EPICS record name | EPICS record type |
|---|---|---|---|---|---|---|
| Trigger and I/O Control | ||||||
| PSSyncIn1Level | asynInt32 | r/o | The level of the Sync In 1 signal | PS_SYNC_IN_1_LEVEL | $(P)$(R)SyncIn1Level_RBV | bi |
| PSSyncIn2Level | asynInt32 | r/o | The level of the Sync In 2 signal | PS_SYNC_IN_2_LEVEL | $(P)$(R)SyncIn2Level_RBV | bi |
| PSSyncOut1Mode | asynInt32 | r/w |
The mode of the Sync Out 1 signal. Allowed values are:
GPO (general purpose output) AcqTrigReady FrameTrigReady FrameTrigger Exposing FrameReadout Imaging Acquiring SyncIn1 SyncIn2 SyncIn3 SyncIn4 Strobe1 Strobe2 Strobe3 Strobe4 |
PS_SYNC_OUT_1_MODE |
$(P)$(R)SyncOut1Mode
$(P)$(R)SyncOut1Mode_RBV |
mbbo
mbbi |
| PSSyncOut1Level | asynInt32 | r/w | The level of the Sync Out 1 signal. This is only programmable when SyncOut1Mode=GPO. | PS_SYNC_OUT_1_LEVEL |
$(P)$(R)SyncOut1Level $(P)$(R)SyncOut1Level_RBV |
bo bi |
| PSSyncOut1Invert | asynInt32 | r/w | Flag to invert the Sync Out 1 signal. | PS_SYNC_OUT_1_INVERT |
$(P)$(R)SyncOut1Invert $(P)$(R)SyncOut1Invert_RBV |
bo bi |
| PSSyncOut2Mode | asynInt32 | r/w | The mode of the Sync Out 2 signal. Allowed values are the same as for PSSyncOut1Mode. | PS_SYNC_OUT_2_MODE |
$(P)$(R)SyncOut2Mode
$(P)$(R)SyncOut2Mode_RBV |
mbbo
mbbi |
| PSSyncOut2Level | asynInt32 | r/w | The level of the Sync Out 2 signal. This is only programmable when SyncOut2Mode=GPO. | PS_SYNC_OUT_2_LEVEL |
$(P)$(R)SyncOut2Level $(P)$(R)SyncOut1Level_RBV |
bo bi |
| PSSyncOut2Invert | asynInt32 | r/w | Flag to invert the Sync Out 2 signal. | PS_SYNC_OUT_2_INVERT |
$(P)$(R)SyncOut2Invert $(P)$(R)SyncOut2Invert_RBV |
bo bi |
| PSSyncOut3Mode | asynInt32 | r/w | The mode of the Sync Out 3 signal. Allowed values are the same as for PSSyncOut1Mode. | PS_SYNC_OUT_3_MODE |
$(P)$(R)SyncOut3Mode
$(P)$(R)SyncOut3Mode_RBV |
mbbo
mbbi |
| PSSyncOut3Level | asynInt32 | r/w | The level of the Sync Out 3 signal. This is only programmable when SyncOut3Mode=GPO. | PS_SYNC_OUT_3_LEVEL |
$(P)$(R)SyncOut3Level $(P)$(R)SyncOut3Level_RBV |
bo bi |
| PSSyncOut3Invert | asynInt32 | r/w | Flag to invert the Sync Out 3 signal. | PS_SYNC_OUT_3_INVERT |
$(P)$(R)SyncOut3Invert $(P)$(R)SyncOut3Invert_RBV |
bo bi |
| PSStrobe1Mode | asynInt32 | r/w |
The mode of the Strobe 1 signal. The Strobe signals are based on the following values,
but allow for changing the delay and width relative to the underlying value. Any
of the outputs can be set to the Stobe1 value, rather than the raw values of these
signals. Allowed values are:
AcqTrigReady FrameTrigReady FrameTrigger Exposing FrameReadout Acquiring SyncIn1 SyncIn2 SyncIn3 SyncIn4 |
PS_STROBE_1_MODE |
$(P)$(R)Strobe1Mode
$(P)$(R)Strobe1Mode_RBV |
mbbo
mbbi |
| PSStrobe1CtlDuration | asynInt32 | r/w | Flag to allow controlling the strobe duration. | PS_STROBE_1_CTL_DURATION |
$(P)$(R)Strobe1CtlDuration $(P)$(R)Strobe1CtlDuration_RBV |
bo bi |
| PSStrobe1Duration | asynFloat64 | r/w | The strobe duration if PSStrobe1CtlDuration is On. | PS_STROBE_1_DURATION |
$(P)$(R)Strobe1Duration $(P)$(R)Strobe1Duration_RBV |
ao ai |
| PSStrobe1Delay | asynFloat64 | r/w | The strobe delay relative to the underlying signal that the strobe is based on. | PS_STROBE_1_DELAY |
$(P)$(R)Strobe1Delay $(P)$(R)Strobe1Delay_RBV |
ao ai |
| Statistics Information | ||||||
| PSReadStatistics | asynInt32 | r/w | Read the Gigabit Ethernet statistics when 1 | PS_READ_STATISTICS | $(P)$(R)PSReadStatistics | longout |
| PSStatDriverType | asynOctet | r/o | Driver type | PS_DRIVER_TYPE | $(P)$(R)PSDriverType_RBV | stringin |
| PSStatFilterVersion | asynOctet | r/o | Packet filter version | PS_FILTER_VERSION | $(P)$(R)PSFilterVersion_RBV | stringin |
| PSStatFrameRate | asynFloat64 | r/o | Frame rate (Hz) | PS_FRAME_RATE | $(P)$(R)PSFrameRate_RBV | ai |
| PSStatFramesCompleted | asynInt32 | r/o | Number of frames completed | PS_FRAMES_COMPLETED | $(P)$(R)PSFramesCompleted_RBV | longin |
| PSStatFramesDropped | asynInt32 | r/o | Number of frames dropped | PS_FRAMES_DROPPED | $(P)$(R)PSFramesDropped_RBV | longin |
| PSStatPacketsErroneous | asynInt32 | r/o | Number of erroneous packets | PS_PACKETS_ERRONEOUS | $(P)$(R)PSPacketsErroneous_RBV | longin |
| PSStatPacketsMissed | asynInt32 | r/o | Number of missed packets | PS_PACKETS_MISSED | $(P)$(R)PSPacketsMissed_RBV | longin |
| PSStatPacketsReceived | asynInt32 | r/o | Number of received packets | PS_PACKETS_RECEIVED | $(P)$(R)PSPacketsReceived_RBV | longin |
| PSStatPacketsRequested | asynInt32 | r/o | Number of packets requested | PS_PACKETS_REQUESTED | $(P)$(R)PSPacketsRequested_RBV | longin |
| PSStatPacketsResent | asynInt32 | r/o | Number of packets resent | PS_PACKETS_RESENT | $(P)$(R)PSPacketsResent_RBV | longin |
| PSBadFrameCounter | asynInt32 | r/o | Number of bad frames | PS_BAD_FRAME_COUNTER | $(P)$(R)PSBadFrameCounter_RBV | longin |
The Prosilica driver is created with the prosilicaConfig command, either from C/C++ or from the EPICS IOC shell.
int prosilicaConfig(char *portName,
int uniqueId,
int maxBuffers, size_t maxMemory,
int priority, int stackSize)
The uniqueId parameter is a unique number assigned to each Prosilica camera. areaDetector uses this number, rather than the TCP/IP address, to find the camera and connect to it. This is done so that the cameras can be configured to use DHCP, and hence have non-predictable TCP/IP addresses. This does mean that areaDetector IOC must be on the same subnet as the camera, since cameras cannot be found by UniqueID through routers. The simplest way to determine the uniqueId of a camera is to run the Prosilica GigEViewer application, select the camera, and press the "i" icon on the bottom of the main window to show the camera information for this camera. The Unique ID will be displayed on the first line in the information window. For details on the meaning of the other parameters to this function refer to the detailed documentation on the prosilicaConfig function in the prosilica.cpp documentation and in the documentation for the constructor for the prosilica class.
There an example IOC boot directory and startup script (iocBoot/iocProsilica/st.cmd) provided with areaDetector.
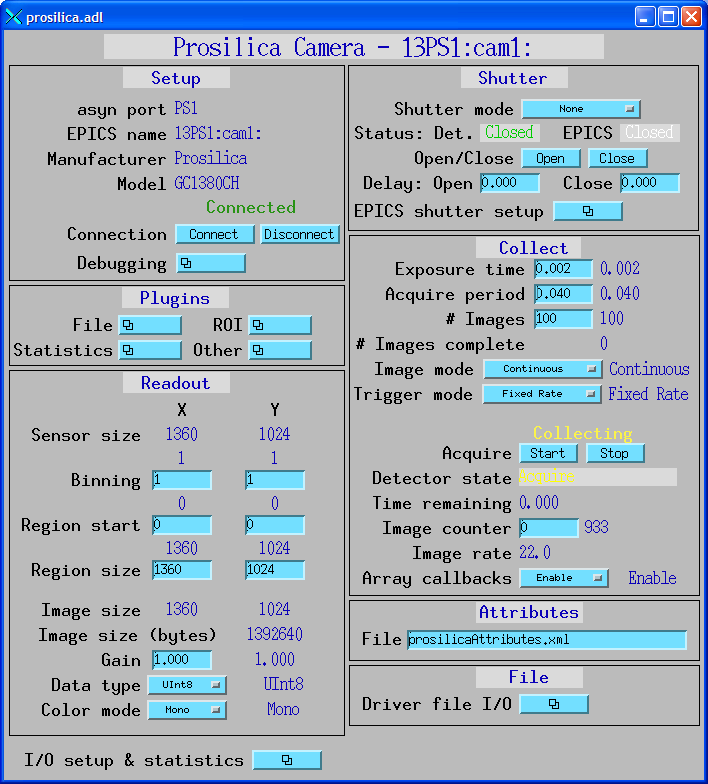
The following is the MEDM screen prosilica.adl.
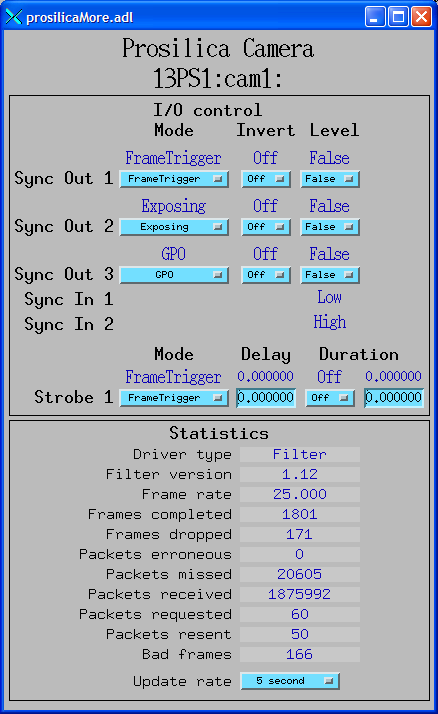
The following is the MEDM screen that provides access to the specific parameters for the Prosilica detector.
The following is an IDL epics_ad_display screen displaying the Prosilica detector images.
Work is needed on connection management. If the camera is unplugged or powered off when the areaDetector driver is running it does not gracefully recover.