| LCLS SLC-Aware IOC Magnet Functional Specification |
|---|
Contact: Kristi Luchini
Last Updated: June 2, 2005
Table of Contents
1 Introduction
2 Requirments
3 Device Control and Monitor
4 Database
5 Displays
6 Applications
7 Error Message Logging
8 Diagnostics
9 Lose Ends
1 Introduction
2 Requirements
The LCLS magnets controls must be able to operate at a rate from 10Hz up to 120Hz . The new LCLS magnets must be able tobe monitored and controlled from the SLC SCP. Since LCLS is sharing the use of the Linac with End-Station A, any software and/or hardware changes needed to switch between running the Linac in LCLS mode vs SLC mode for End-Station A, shall not take longer than 15 minutes. Therefore, any SLC database changes necessary to run any existing magnets in LCLS mode must be reset to their SLC state within the time restrictions prescribed. In addition, the VME hardware used to control and monitor the magnets from EPICS shall exhibit a minimum of the same properties on a magnet SCP displays as the existing SLC magnets, providing transparency of operation to the operators. New EPICS displays will be required to control and monitor. In Phase I, all LCLS magnets with the exception of the Undulator can be monitored from an EPICS EDM display as well as an SLC SCP display. However, it is not required that the users be able to control an old SLC magnet ps from an EPICS display. This capability will be provided, but may not be availalbe on day 1.3 Device Control and Monitor
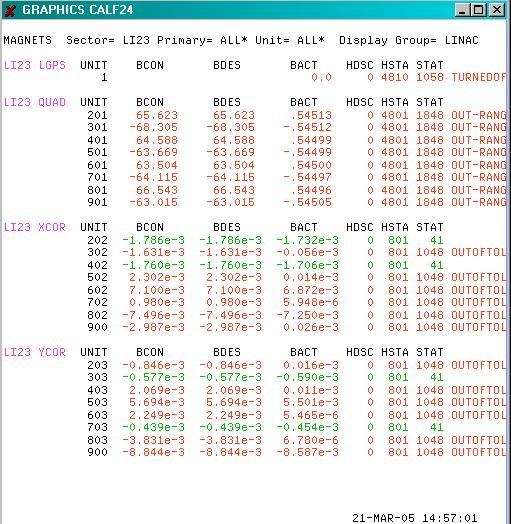
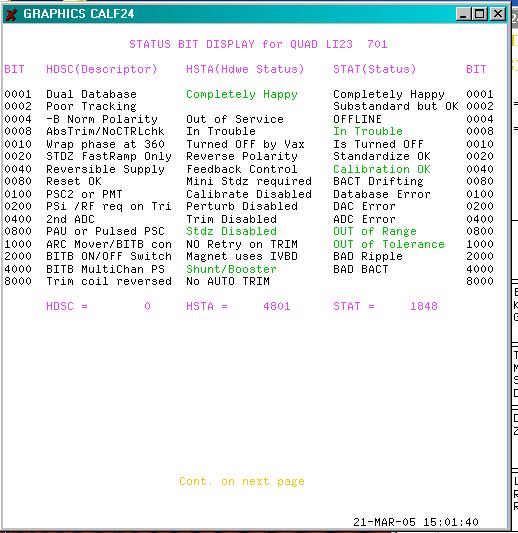
The SLC micro magnet job currently handles both magnet and magnet-like devices. A magnet device is a controllable magnet with power supply, whereas magnet-like device is not a magnet at all. These devices are simply defined in the SLC database by a subset of the magnet secondaries and as such are controlled and monitored by the the magnet software. Table 4.1-1 below provides a list of SLC database magnet primaries. It is important to note that Table 2-1 also provides magnet primaries that are used by modeling programs and modeling applications such as LEM,steering and chormaticity but that the SLC micros do not use to control a magnet device3.1 Magnet Functions
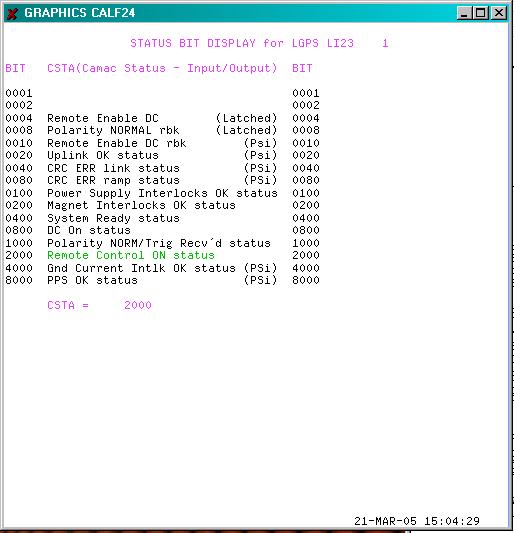
To maintain functionality the SLC-Aware IOC will proivid a magnet facility to control (hdnlr) and monitor (async) both magnet and magnet-like devices. The standard magnet funtions listed in table 2-2 below will be supported fromVMS via the messages service which will send a request to the EPICS ioc by performing a dbput. The EPICS magnet software will only deal with magnet devices. All primaries dealing with stepper controls and other magnet-like devices will be handled separately.Magnet functions are sent from the Alpha to the micro, where the messages are proccessed and the appropriate action is then taken. There are also some functions performed directly on the Alpha via virtual CAMAC, this type of access will not be supported. However, there is one function that turns on/off Large Power Supplies (LGPS) using virtual CAMAC. This functionality will be supported and extend to include other magnet power supply on/off control. Degaussing is another function that is performed on the Alpha. Degaussing gets rid of the residual field. This function is necessary for LCLS injector magnets. So extending this existing code will be necessary as well as extending the standalone ACCESS to include a new DCL verb for degaussing.
Below are tables listing the magnet functions found on the micro and the VAX. Please note that the functions that will not be supported are hightlighted in yellow.
| Function |
Description |
Supported |
|---|---|---|
| LGON |
Turn on large ps |
Yes |
| LGOF |
Turn off large ps |
Yes |
| DEGA |
Degauss |
Yes |
| PSON |
Magnet ps on |
New |
| PSOF |
Magnet ps off |
New |
3.2 Magnet
Handler Thread
The magnet request handler is a task run on the SLC Aware IOC that
handle magnet messages (see Table
3.3-2). This task is started by DBEXEC after boot. The
magnet messages can originate either locally or from a process on the
Alpha such as a SCP or from Paranoia. The following is functional
what will occur:- Create a message queue.
- Initialize magnet and magnet-like device db lists. These db lists will be global to magnet tasks only.
- Do some consistency checking between some EPICS pv's and SLC db
pv's. EPICS PV's are the master at this point.
- Log messages if inconsistencies found, and update local db for
all but supertype 1.
- Set a done init flag when finished. This flag is to be used for internal diagnostics only.
- Set the magnet handler active flag to TRUE
- Begin metering messags
- Enter a while loop waiting for messages in the queue (click here) or stop flag set. If stop flat exit loop.
- Set the magnet handler active flag to FALSE.
- Perform any cleanup
- Exit